The seabed sounding is applied using the Ultra High Resolution multibeam Multi-detect Teledyne Reason T20 R that overcovers the International Hydrographic Organization – I.H.O. instructions -of ‘Special Order’ specifications that are required for the seabed sounding. It is applied in port construction study, coast protection, water and drains reasearch and much more.
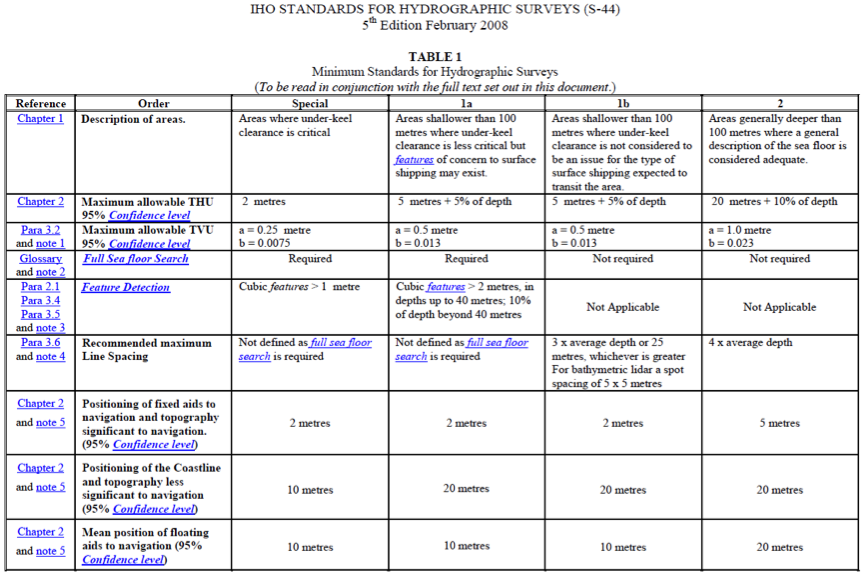
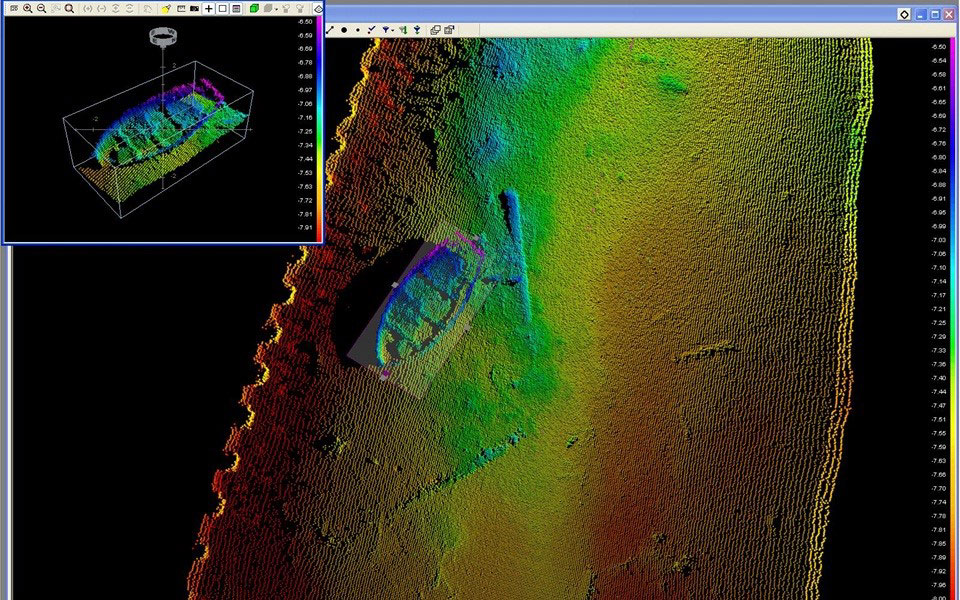
According to the “Special Order” category requirements, Full SeaBed Search is necessary. The MBES systems fulfills this aim by allowing the seabed to be embossed with a particularly dense point collection so that even objects of a few centimeters can be identified (Figure 1).
Methodology
The seabed mapping of the MBES system provides full mapping services with a high precision too. The three-dimensional modeling of the entire seabed is done by processing in appropriate software (Teledyne PDS). When collecting and processing the data, the whole boat movements like: the pitching, rolling, heaving, heading as well as the exact location through GNSS RTK detection, the speed of water sound propagation through appropriate sensors and tidal data are taken into account.
The MBES system is able to perform a seabed mapping with a resolution of better than 1 cm. The measurement of the position of the Hydrographic vessel is better than 2-3cm, its pitch, roll is 0.03° and the class is <0.05 °. Primary data collection is done after having applied a roll stabilization so that the sweep zone ripples don’t affect the whole process.
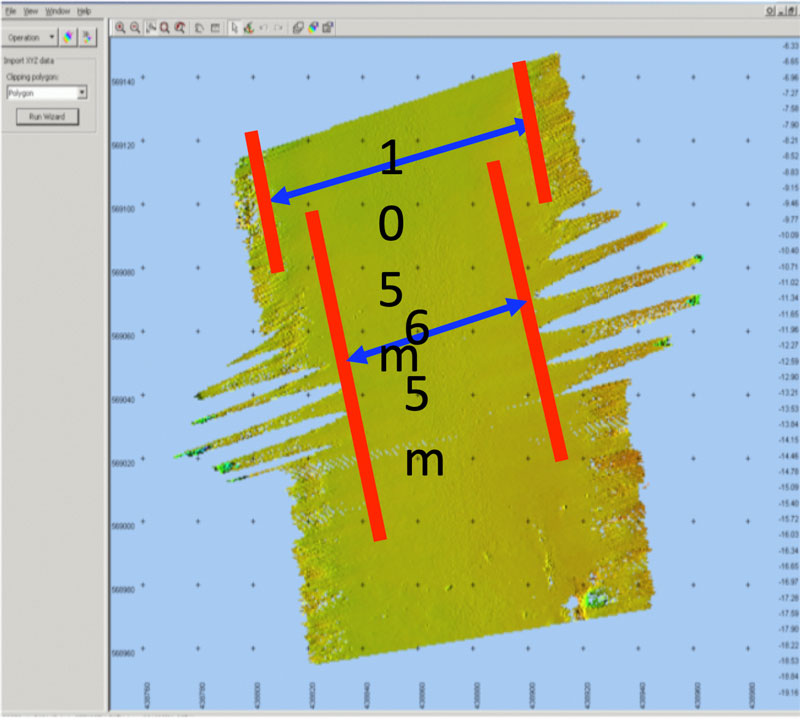
The swath width zone during navigation is up to (x10) times the depth of the seabed bottom. Thus, a large overlap on the scanning lines is achieved and the positions close to the piers are covered without the need to move the bound ships.

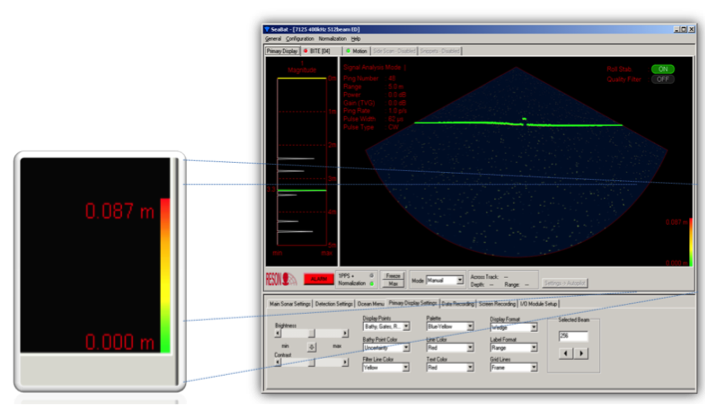
The MBES system provides real-time estimation of sonar accuracy by combining the uncertainty of each beam and the data from all sensors, identifying TPU (Total Propagated Uncertainty).